 商标分类
商标分类  商标转让
商标转让 
一种智能垃圾焚烧车的高效燃烧控制方法与流程
 2021-03-08 19:03:15|
2021-03-08 19:03:15| 464|
464| 起点商标网
起点商标网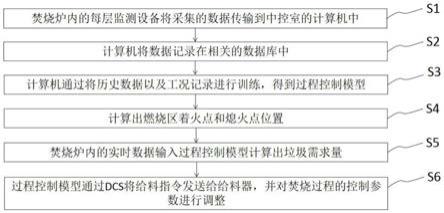
[0001]
本发明属于垃圾焚烧技术领域,特别是涉及一种智能垃圾焚烧车的高效燃烧控制方法。
背景技术:
[0002]
在垃圾焚烧发电的项目应用情况看,虽然对垃圾焚烧仍存在许多人无法克服的缺点与盲点,然而用于垃圾处理至少能提供以下优点:1、减量:减少垃圾体积约80%~90%。2、去毒:使垃圾中有害物质转化成稳定的不宜分解的物质。3、资源能源的再利用:回收有用的物质与能源的回收。4、安全:垃圾焚烧是现今较安全且无危险性的方法。
[0003]
垃圾焚烧炉最理想的火车状态为:火床平整,着火面均匀,着火线在第二风室上部,主燃区在第三风室上部,收火线在第四风室上部,第一风室上部为预热区,第五风室上部为燃尽区。
[0004]
由于国内特别是中小城市的没有经过分类筛选后的垃圾存在这热值低、水分大、成分复杂的问题,导致现阶段国内的垃圾焚烧都依靠操作员的经验手动操作炉排、一次风等,这就需要焚烧厂加大人员培养和人员招聘,从而推高了运营成本,且手动调整参数,很容易造成锅炉参数的波动且稳定周期变长。
[0005]
传统的垃圾自动燃烧控制是根据垃圾燃烧后生成的参数进行控制,由于垃圾燃烧具有大延迟,其延时时间根据垃圾状况和燃烧工况的不同存在较大的离散度,因此造成了自动燃烧工况的大幅度波动。
技术实现要素:
[0006]
本发明的目的在于提供一种智能垃圾焚烧车的高效燃烧控制方法,通过对焚烧炉内的每层监测设备将采集的数据传输到中控室的计算机中,训练过程控制模型,实现了对垃圾焚烧过程控制参数的建模计算,根据焚烧设备的运行数据对焚烧过程中的控制参数进行调节,解决了现有的垃圾焚烧多为人工凭经验操作、智能化程度不足、垃圾焚烧不彻底以及环境污染严重的问题。
[0007]
为解决上述技术问题,本发明是通过以下技术方案实现的:
[0008]
本发明为一种智能垃圾焚烧车的高效燃烧控制方法,包括如下步骤:
[0009]
步骤s1:焚烧炉内的每层监测设备将采集的数据传输到中控室的计算机中;
[0010]
步骤s2:计算机将数据记录在相关的数据库中;
[0011]
步骤s3:计算机通过将历史数据以及工况记录进行训练,得到过程控制模型;
[0012]
步骤s4:计算出燃烧区着火点和熄火点位置;
[0013]
步骤s5:焚烧炉内的实时数据输入过程控制模型计算出垃圾需求量;
[0014]
步骤s6:过程控制模型通过dcs将给料指令发送给给料器,并对焚烧过程的控制参数进行调整;
[0015]
步骤s7:对焚烧室产生的滤渣、滤液和废气进行处理。
[0016]
优选地,所述步骤s1中,监测设备包括测温探头、蒸汽流量仪、氧量传感器;所述测温探头,用以检测焚烧炉内每层的温度;所述蒸汽流量仪,用以检测焚烧炉内蒸汽的流量;所述氧量传感器,用以检测焚烧炉内的氧气含量。
[0017]
优选地,所述步骤s3中,过程控制模型由bp算法训练多个相同结构的只有初始权值不同得子网,并把各子网的输出综合,作为过程控制模型的输出。
[0018]
优选地,所述步骤s4中,燃烧区着火点和熄火点位置通过测温探头测试的温度计算,并计算垃圾焚烧炉的推料器上垃圾密度的变化,来调整推料器的速度;当推料器上垃圾的密度增大时,则降低推料器的速度;当推料器上垃圾的密度减少时,则增加推料器的速度。
[0019]
优选地,所述燃烧区着火点在预设的着火点之前,则需要加快上炉排速度;若燃烧区着火点在预设的着火点之后,则需要减慢上炉排速度;所述熄火点在预设熄火点之前时,则加快下炉排速度;若熄火点在预设熄火点之后时,则减慢下炉排速度。
[0020]
优选地,所述步骤s5中,计算垃圾需求量通过垃圾热值、焚烧炉效率、给水焓值结合热平衡计算得到。
[0021]
优选地,所述步骤s7中,对焚烧炉排出的固态废渣从炉床的底部排出,被排出来的不燃物和炉渣输送至不燃物振动筛,振动筛对不燃物和炉砂进行筛选和分离;筛选和分离后的炉砂用砂循环装置和砂投入阀送回炉内循环使用。
[0022]
优选地,所述步骤s7中,对焚烧炉排出的液态废渣采用在焚烧炉顶加装喷淋装置,给予高温处理,同时控制炉顶温度。
[0023]
本发明具有以下有益效果:
[0024]
本发明通过对焚烧炉内的每层监测设备将采集的数据传输到中控室的计算机中,训练过程控制模型,实现了对垃圾焚烧过程控制参数的建模计算,根据焚烧设备的运行数据对焚烧过程中的控制参数进行调节,提高了垃圾焚烧的自动化程度和燃烧效率,降低对环境污染。
[0025]
当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
附图说明
[0026]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0027]
图1为本发明的一种智能垃圾焚烧车的高效燃烧控制方法步骤图。
具体实施方式
[0028]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0029]
请参阅图1所示,本发明为一种智能垃圾焚烧车的高效燃烧控制方法,包括如下步
骤:
[0030]
步骤s1:焚烧炉内的每层监测设备将采集的数据传输到中控室的计算机中;
[0031]
步骤s2:计算机将数据记录在相关的数据库中;
[0032]
步骤s3:计算机通过将历史数据以及工况记录进行训练,得到过程控制模型;
[0033]
步骤s4:计算出燃烧区着火点和熄火点位置;
[0034]
步骤s5:焚烧炉内的实时数据输入过程控制模型计算出垃圾需求量;
[0035]
步骤s6:过程控制模型通过dcs将给料指令发送给给料器,并对焚烧过程的控制参数进行调整;
[0036]
步骤s7:对焚烧室产生的滤渣、滤液和废气进行处理。
[0037]
优选地,步骤s1中,监测设备包括测温探头、蒸汽流量仪、氧量传感器;测温探头,用以检测焚烧炉内每层的温度;蒸汽流量仪,用以检测焚烧炉内蒸汽的流量;氧量传感器,用以检测焚烧炉内的氧气含量。
[0038]
优选地,步骤s3中,过程控制模型由bp算法训练多个相同结构的只有初始权值不同得子网,并把各子网的输出综合,作为过程控制模型的输出,得到了明显优于单个bp子网的泛化性能;优于选择不同的初始权值所得结果不同,使最终神经网络的泛化能力体现出一定的随机性;利用这种随机特性也可以改善神经网络的泛化能力;即先训练一组只有初始权值不同的子网,然后通过各子网的输出得到学习系统的输出。
[0039]
其中,步骤s4中,燃烧区着火点和熄火点位置通过测温探头测试的温度计算,并计算垃圾焚烧炉的推料器上垃圾密度的变化,来调整推料器的速度;当推料器上垃圾的密度增大时,则降低推料器的速度;当推料器上垃圾的密度减少时,则增加推料器的速度。
[0040]
其中,燃烧区着火点在预设的着火点之前,则需要加快上炉排速度;若燃烧区着火点在预设的着火点之后,则需要减慢上炉排速度;熄火点在预设熄火点之前时,则加快下炉排速度;若熄火点在预设熄火点之后时,则减慢下炉排速度。
[0041]
其中,步骤s5中,计算垃圾需求量通过垃圾热值、焚烧炉效率、给水焓值结合热平衡计算得到;根据垃圾需求量,系统实时计算出给料速率,通过dos将指令发送给给料器,实现自动投料。
[0042]
其中,步骤s7中,对焚烧炉排出的固态废渣从炉床的底部排出,被排出来的不燃物和炉渣输送至不燃物振动筛,振动筛对不燃物和炉砂进行筛选和分离;筛选和分离后的炉砂用砂循环装置和砂投入阀送回炉内循环使用。
[0043]
其中,步骤s7中,对焚烧炉排出的液态废渣采用在焚烧炉顶加装喷淋装置,给予高温处理,同时控制炉顶温度。
[0044]
值得注意的是,上述系统实施例中,所包括的各个单元只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
[0045]
另外,本领域普通技术人员可以理解实现上述各实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,相应的程序可以存储于一计算机可读取存储介质中。
[0046]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,
可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
 热门咨询
热门咨询




tips