 商标分类
商标分类  商标转让
商标转让 
用于自动驾驶车辆的掉头控制系统和方法与流程
 2021-02-03 16:02:05|
2021-02-03 16:02:05| 1508|
1508| 起点商标网
起点商标网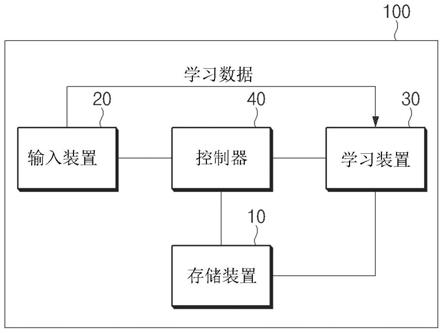
用于自动驾驶车辆的掉头控制系统和方法
[0001]
与相关申请的交叉引用
[0002]
本申请要求2019年7月4日提交的韩国专利申请第10-2019-0080539号的优先权,该申请的全部内容通过引用合并于本文中。
技术领域
[0003]
本发明涉及基于深度学习来确定自动驾驶的掉头可能性的技术,并且更具体地说,涉及细分关于自动驾驶车辆进行掉头时的各种安全情况的信息以执行深度学习的掉头控制系统。
背景技术:
[0004]
通常,深度学习或深度神经网络是机器学习的一种类型。在输入和输出之间配置了多层的人工神经网络(artificial neural network,ann)。根据ann的结构、要解决的问题、目的等,ann可以包括卷积神经网络(cnn)、递归神经网络(rnn)等。深度学习用于解决各种问题,例如分类、回归、定位、检测和分割。具体地,在自动驾驶系统中,利用能够确定动态或静态障碍物的位置和类型的语义分割和对象检测。
[0005]
语义分割是指在逐个像素的基础上执行分类预测以检测图像中的对象,并将该对象分割为具有相同含义的每个像素。通过语义分割,可以验证图像中是否存在特定对象并验证像素的位置,并且可以更准确地确认具有相同的含义的每个像素(相同的对象)。
[0006]
对象检测是指对图像中的对象的类型进行分类和预测,并对边界框(bounding box)进行回归预测以获得对象的位置信息。不同于简单的分类,通过对象检测可以确定图像中的对象是什么类型以及对象的位置信息。尚未研发出基于这种深度学习来确定自动驾驶车辆是否能够进行掉头的技术。
技术实现要素:
[0007]
本发明提供了一种用于自动驾驶车辆的掉头控制系统和方法,该系统细分关于自动驾驶车辆进行掉头时针对安全性要考虑的各种情况的信息以执行深度学习并基于学习到的结果来确定自动驾驶车辆是否能够进行掉头,从而降低事故风险。
[0008]
本发明构思要解决的技术问题不限于上述问题,并且本发明所属领域的技术人员将从以下描述中清楚地理解本文中未提及的任何其它技术问题。
[0009]
根据本发明的一个方面,一种装置可以包括:学习装置,其按每个组细分关于自动驾驶车辆进行掉头时要考虑的情况的信息并执行深度学习;以及控制器,其配置为基于由学习装置学习到的结果来执行自动驾驶车辆的掉头。掉头控制器还可以包括输入装置,其配置为按每个组输入关于当前时间的情况的信息的数据。所述控制器可以配置为通过将经由输入装置输入的数据应用于由学习装置学习到的结果来确定自动驾驶车辆是否能够进行掉头。
[0010]
另外,所述控制器可以配置为考虑自动驾驶车辆是否遵守交通法规来确定自动驾
驶车辆是否能够进行掉头。所述控制器还可以配置为:在写有语句“掉头信号时”的掉头标志位于自动驾驶车辆的前方的情况下,当掉头交通信号灯开启时,确定出自动驾驶车辆能够进行掉头。
[0011]
所述控制器可以配置为:尽管掉头标志位于自动驾驶车辆的前方,但是当自动驾驶车辆未位于允许掉头区域时,确定出自动驾驶车辆不能够进行掉头。所述控制器还可以配置为:当自动驾驶车辆正在行驶的掉头车道的左侧线为间断的分隔线时,确定自动驾驶车辆所在的区域为允许掉头区域,并且所述控制器可以配置为:当自动驾驶车辆所在的掉头车道的左侧线是连续的分隔线时,确定自动驾驶车辆所在的区域为禁止掉头区域。
[0012]
所述输入装置可以包括以下装置中的至少一个或多个:第一数据提取器,其配置为提取用于防止在自动驾驶车辆进行掉头时与在自动驾驶车辆的前方进行掉头的前车发生碰撞的第一组数据;第二数据提取器,其配置为提取用于防止在自动驾驶车辆进行掉头时与周围车辆发生碰撞的第二组数据;第三数据提取器,其配置为提取用于防止在自动驾驶车辆进行掉头时与行人发生碰撞的第三组数据;第四数据提取器,其配置为提取在自动驾驶车辆进行掉头时位于自动驾驶车辆前方的掉头标志作为第四组数据;第五数据提取器,其配置为提取在自动驾驶车辆进行掉头时位于自动驾驶车辆前方的各种交通信号灯的开启状态作为第五组数据;第六数据提取器,其配置为提取基于静态对象分布的可行驶区域、基于道路施工路段的可行驶区域以及基于事故路段的可行驶区域作为第六组数据;第七数据提取器,其配置为提取基于道路的结构的可行驶区域作为第七组数据;以及第八数据提取器,其配置为提取由第六数据提取器提取的可行驶区域和由第七数据提取器提取的可行驶区域重叠的区域作为第八组数据。
[0013]
所述第一组数据可以包括交通信号灯的开启状态、横摆率或者纵向加速度随时间的累积值中的至少一个或多个。所述第二组数据可以包括周围车辆的位置、速度、加速度、横摆率或前进方向中的至少一个或多个。所述第三组数据可以包括行人的位置、速度或前进方向或者行人周围的详细地图中的至少一个或多个。所述输入装置还可以包括第九数据提取器,其配置为提取作为自动驾驶车辆的行为数据的速度、加速度、前进方向、方向盘角度、横摆率或故障代码中的至少一个或多个作为第九组数据。
[0014]
根据本发明的另一个方面,一种方法可以包括:利用学习装置按每个组细分关于自动驾驶车辆进行掉头时要考虑的情况的信息并且利用学习装置执行深度学习;基于学习装置学习到的结果,利用控制器执行自动驾驶车辆的掉头。
[0015]
所述方法还可以包括利用输入装置按每个组输入关于当前时间的情况的信息的数据。执行自动驾驶车辆的掉头可以包括:通过将输入的数据应用于由学习装置学习到的结果来确定自动驾驶车辆是否能够进行掉头。另外,执行自动驾驶车辆的掉头可以包括考虑自动驾驶车辆是否遵守交通法规来确定自动驾驶车辆是否能够进行掉头。确定自动驾驶车辆是否能够进行掉头可以包括在写有语句“掉头信号时”的掉头标志位于自动驾驶车辆的前方的情况下,当掉头交通信号灯开启时,确定出自动驾驶车辆能够进行掉头。
[0016]
然而,尽管掉头标志位于自动驾驶车辆的前方,但是当自动驾驶车辆未位于允许掉头区域时,确定出不能够掉头。确定自动驾驶车辆是否能够进行掉头还可以包括:当自动驾驶车辆所在的掉头车道的左侧线是间断的分隔线时,确定自动驾驶车辆所在的区域为允许掉头区域;当自动驾驶车辆所在的掉头车道的左侧线是连续的分隔线时,确定自动驾驶
车辆所在的区域为禁止掉头区域。
[0017]
按每个组输入数据可以包括:提取用于防止在自动驾驶车辆进行掉头时与在自动驾驶车辆的前方进行掉头的前车发生碰撞的第一组数据,提取用于防止在自动驾驶车辆进行掉头时与周围车辆发生碰撞的第二组数据,提取用于防止在自动驾驶车辆进行掉头时与行人发生碰撞的第三组数据,提取在自动驾驶车辆进行掉头时位于自动驾驶车辆前方的掉头标志作为第四组数据,提取在自动驾驶车辆进行掉头时位于自动驾驶车辆前方的各种交通信号灯的开启状态作为第五组数据,提取基于静态对象分布的可行驶区域、基于道路施工路段的可行驶区域以及基于事故路段的可行驶区域作为第六组数据,提取基于道路的结构的可行驶区域作为第七组数据,提取由第六数据提取器提取的可行驶区域和由第七数据提取器提取的可行驶区域重叠的区域作为第八组数据。
[0018]
所述第一组数据可以包括交通信号灯的开启状态、横摆率或者纵向加速度随时间的累积值中的至少一个或多个。所述第二组数据可以包括周围车辆的位置、速度、加速度、横摆率或者前进方向中的至少一个或多个。所述第三组数据可以包括行人的位置、速度或前进方向或者行人周围的详细地图中的至少一个或多个。按每个组输入数据还可以包括提取作为自动驾驶车辆的行为数据的速度、加速度、前进方向、方向盘角度、横摆率或者故障代码中的至少一个或多个作为第九组数据。
附图说明
[0019]
通过以下结合附图的详细描述,本发明的以上和其它目的、特征和优点将变得更加明显,附图中:
[0020]
图1是示出根据本发明的示例性实施方案的用于自动驾驶车辆的掉头控制器的配置的框图;
[0021]
图2是示出根据本发明的示例性实施方案的用于自动驾驶车辆的掉头控制器的详细配置的框图;
[0022]
图3是示出根据本发明的示例性实施方案的包括在用于自动驾驶车辆的掉头控制器中的第一数据提取器提取第一组数据的情况的示意图;
[0023]
图4a、图4b和图4c是示出根据本发明的示例性实施方案的包括在用于自动驾驶车辆的掉头控制器中的第二数据提取器提取第二组数据的情况的示意图;
[0024]
图5a、图5b和图5c是示出根据本发明的示例性实施方案的包括在用于自动驾驶车辆的掉头控制器中的第三数据提取器提取第三组数据的情况的示意图;
[0025]
图6是示出根据本发明的示例性实施方案的由包括在用于自动驾驶车辆的掉头控制器中的第四数据提取器提取的作为第四组数据的掉头标志的示意图;
[0026]
图7是示出根据本发明的示例性实施方案的包括在用于自动驾驶车辆的掉头控制器中的第五数据提取器提取交通信号灯的开启状态作为第五组数据的情况的示意图;
[0027]
图8a和图8b是示出根据本发明的示例性实施方案的由包括在用于自动驾驶车辆的掉头控制器中的第六数据提取器提取的作为第六组数据的可行驶区域的示意图;
[0028]
图9a和图9b是示出根据本发明的示例性实施方案的由包括在用于自动驾驶车辆的掉头控制器中的第七数据提取器提取的作为第七组数据的可行驶区域的示意图;
[0029]
图10是示出根据本发明的示例性实施方案的由包括在用于自动驾驶车辆的掉头
控制器中的第八数据提取器提取的作为第八组数据的最终可行驶区域的示意图;
[0030]
图11a和图11b是示出根据本发明的示例性实施方案的包括在用于自动驾驶车辆的掉头控制器中的条件确定装置确定自动驾驶车辆是否遵守交通法规的情况的示意图;
[0031]
图12是示出根据本发明的示例性实施方案的用于自动驾驶车辆的掉头控制方法的流程图;以及
[0032]
图13是示出根据本发明的示例性实施方案的用于执行用于自动驾驶车辆的掉头控制方法的计算系统的框图。
具体实施方式
[0033]
应当理解,本文中所使用的术语“车辆”或“车辆的”或其它类似术语一般包括机动车辆,例如包括运动型多用途车辆(suv)、大客车、大货车、各种商用车辆的乘用汽车,包括各种舟艇、船舶的船只,航空器等等,并且包括混合动力车辆、电动车辆、内燃机车辆、插电式混合动力电动车辆、氢动力车辆以及其它替代性燃料车辆(例如源于非石油的能源的燃料)。
[0034]
尽管示例性实施方案描述为利用多个单元来执行示例性过程,但是可以理解,示例性过程也可以由一个或多个模块执行。此外,可以理解,术语“控制器/控制单元”指包括存储器和处理器的硬件装置。存储器配置为存储模块,处理器具体地配置为运行所述模块来进行下面进一步描述的一个或多个过程。
[0035]
此外,本发明的控制逻辑可以实施为非易失性计算机可读介质,所述非易失性计算机可读介质为包括由处理器、控制器/控制单元等等运行的可执行的程序指令的计算机可读介质。计算机可读介质的示例包括但不局限于:rom、ram、光盘(cd)-rom、磁带、软盘、闪存驱动器、智能卡以及光学数据存储装置。计算机可读记录介质也可以分布在网络联接的计算机系统中,以使计算机可读介质以分布式的形式(例如,通过远程信息处理服务器或者控制器局域网(can))存储和运行。
[0036]
在本文中使用的术语仅仅用于描述具体实施方案的目的,并非旨在限制本发明。正如本文中所使用的,单数形式的“某一个”、“一个”和“该”旨在同样包括复数形式,除非上下文明确表示不包括复数形式。还将进一步理解,当在本明书中使用术语“包括”和/或“包括了”时,指明存在所述特征、数值、步骤、操作、元件和/或组件,但是不排除存在或加入一种或多种其它的特征、数值、步骤、操作、元件、组件和/或其群组。正如本文所使用的,术语“和/或”包括一种或多种相关列举项的任何和所有组合。
[0037]
下文将参照示例性的附图对本发明的一些示例性实施方案进行详细描述。在将附图标记添加到每一附图的组件时,应注意,即便这些组件也在其它附图上显示,相同的或等同的组件也由相同的附图标记来指定。另外,在描述本发明的示例性实施方案时,为了不必要地模糊本发明的要点,将排除对已知的特征或功能的详细描述。
[0038]
在描述根据本发明的实施方案的组件时,可以使用诸如第一、第二、“a”、“b”、(a)、(b)等等术语。这些术语仅仅用于将一个组件与另一个组件区分开,并且这些术语不限制组成组件的性质、顺序或次序。除非另外定义,否则在本文中使用的所有术语,包括技术或科学术语,都具有与本发明所属领域的技术人员通常理解的相同的含义。在通常使用的字典中定义的那些术语应被解释为具有与相关技术领域中的上下文含义相同的含义,并且不应
被解释为具有理想或过于正式的含义,除非在本申请中明确定义为具有这样的含义。
[0039]
在本发明的示例性实施方案中,信息可以用作包括数据的概念。图1是示出根据本发明的示例性实施方案的用于自动驾驶车辆的掉头控制器的配置的框图。如图1所示,根据本发明的示例性实施方案的用于自动驾驶车辆的掉头控制器100可以包括:存储装置10、输入装置20、学习装置30以及控制器40。具体地,根据本发明的示例性实施方案,根据执行用于自动驾驶车辆的掉头控制器100的方式,各个组件可以彼此组合以形成一个组件,并且可以省略一些组件。
[0040]
参见各个组件,首先,存储装置10可以配置为存储在如下过程中所需的各种逻辑、算法和程序:按每个组细分关于自动驾驶车辆进行掉头时针对安全性要考虑的各种情况的信息以进行深度学习的过程和基于学习到的结果来确定自动驾驶车辆是否能够进行掉头的过程。存储装置10可以配置为存储由学习装置30学习到的结果(例如,用于安全掉头的学习模型)。
[0041]
存储装置10可以包括至少一种类型的存储介质,例如闪存型存储器、硬盘型存储器、微型存储器、卡型存储器(例如,安全数字(sd)卡或极限数字(xd)卡)、随机存取存储器(ram)、静态ram(sram)、只读存储器(rom)、可编程rom(prom)、电可擦除prom(eeprom)、磁性ram(mram)、磁盘以及光盘。
[0042]
输入装置20可以配置为向学习装置30输入(提供)在学习安全掉头的过程中所需的数据(学习数据)。此外,输入装置20可以配置为执行向控制器40输入在确定自动驾驶车辆是否能够进行掉头的过程中所需的当前时间的数据的功能。学习装置30可以配置为基于深度学习来学习经由输入装置20输入的数据。具体地,学习数据可以是如下格式:按每个组细分关于自动驾驶车辆进行掉头时针对安全性要考虑的各种情况(例如,场景或条件)的信息。
[0043]
学习装置30可以配置为以各种方式进行学习。例如,学习装置30可以配置为:在尚未执行学习的开始阶段(例如,在开始学习之前)基于仿真来执行学习,在学习执行到某种程度的中间阶段(例如,在开始学习之后)基于云服务器来执行学习,在学习结束之后基于个人的掉头偏好来执行其它学习。具体地,云服务器可以配置为从每个车辆都进行掉头的多个车辆以及基础设施收集关于各种情况的信息,并且云服务器可以配置为将收集到的情况信息作为学习数据提供给自动驾驶车辆。
[0044]
控制器40可以配置为执行总体控制以操作各个组件来执行各个功能。控制器40可以以硬件或软件的形式或其组合的形式来实现。例如,控制器40可以实现为微处理器,但不限于此。具体地,控制器40可以配置为执行在以下过程中所需的各种控制:细分关于自动驾驶车辆进行掉头时针对安全性要考虑的各种情况的信息以执行深度学习的过程以及基于学习到的结果来确定自动驾驶车辆是否能够进行掉头的过程。
[0045]
控制器40可以配置为将经由输入装置20输入的关于当前时间的周围环境的数据应用于由学习装置30学习到的结果,以确定自动驾驶车辆是否能够进行掉头。当确定自动驾驶车辆是否能够进行掉头时,控制器40还可以配置为考虑自动驾驶车辆是否遵守交通法规。换句话说,尽管将经由输入装置20输入的关于当前时间的周围环境的数据应用于由学习装置30学习到的结果的结果指示自动驾驶车辆能够进行掉头,但是控制器40也可以配置为进一步确定自动驾驶车辆是否遵守交通法规,以最终确定自动驾驶车辆是否能够进行掉
头。
[0046]
例如,当写有短语“掉头信号时(on u-turn signal)”(或者指示掉头信号的类似短语)的掉头标志位于自动驾驶车辆的前方时,尽管基于由学习装置30学习到的结果而得到的结果指示自动驾驶车辆能够进行掉头,但是当掉头交通信号灯未开启时,控制器40可以配置为确定出自动驾驶车辆不能够进行或执行掉头。作为另一示例,当自动驾驶车辆的掉头路径与周围车辆的行驶轨迹重叠或者在距离周围车辆的行驶轨迹恒定距离内时,控制器40可以配置为确定出周围车辆不会给自动驾驶车辆让路,因此确定出自动驾驶车辆不能够进行掉头。
[0047]
作为又一示例,尽管掉头标志位于自动驾驶车辆的前方,但是当自动驾驶车辆不在允许掉头区域上时,控制器40可以配置为确定出自动驾驶车辆不能够进行掉头。具体地,当自动驾驶车辆所在的掉头车道上的左侧道路线(例如,绘制在道路上的线)是间断的分隔线时,控制器40可以配置为确定自动驾驶车辆所在的区域为允许掉头区域。然而,当左侧道路线是连续的分隔线时,控制器40可以配置为确定自动驾驶车辆所在的区域为禁止掉头区域。
[0048]
如图2所示,输入装置20可以包括:光检测和测距(lidar)传感器211、摄像机212、无线电检测和测距(雷达)传感器213、车辆对万物(v2x)模块214、地图215、全球定位系统(gps)接收器216和车辆网络217。lidar传感器211可以是一种类型的环境传感器,并且可以配置为基于安装在自动驾驶车辆上并且旋转的反射器全方位地输出激光束之后的激光束被反射和返回的时间来测量反射器的位置坐标等。
[0049]
摄像机212可以安装在车内后视镜的后部,以捕获包括自动驾驶车辆周围的车道、车辆、人等等的图像。雷达传感器213可以配置为接收在电磁波发射之后从对象反射的电磁波,以测量距离对象的距离、对象的方向等。雷达传感器213可以安装在自动驾驶车辆的前保险杠和后侧,并且可以配置为执行远距离对象识别。雷达传感器213还可以不受天气影响。
[0050]
v2x模块214可以包括车辆到车辆(v2v)模块(未示出)和车辆到基础设施(v2i)模块(未示出)。v2v模块可以配置为与周围车辆通信以获得周围车辆的位置、速度、加速度、横摆率、前进方向等。v2i模块可以配置为从基础设施获得道路的形式、周围结构、或关于交通信号灯的信息(例如,位置或开启状态(红色、黄色、绿色等))。
[0051]
地图215可以是用于自动驾驶的详细地图并且可以包括关于车道、交通信号灯或标志的信息,以测量自动驾驶车辆的位置并提高自动驾驶的安全性。gps接收器216可以配置为从三个或更多个gps卫星接收gps信号。车辆网络217可以是用于在自动驾驶车辆中的各个控制器之间进行通信的网络并且可以包括控制器局域网(can)、本地互连网络(lin)、flexray、面向媒体的系统传输(most)、以太网等。
[0052]
此外,输入装置20可以包括对象信息检测器221、基础设施信息检测器222以及位置信息检测器223。对象信息检测器221可以配置为基于lidar传感器211、摄像机212、雷达传感器213以及v2x模块214来检测自动驾驶车辆周围的对象信息。具体地,对象可以包括位于道路上的车辆、人以及物品或物料。对象信息可以是关于对象的信息并且可以包括车辆的速度、加速度或横摆率、纵向加速度随时间的累积值等。
[0053]
基础设施信息检测器222可以配置为基于lidar传感器211、摄像机212、雷达传感
器213、v2x模块214以及详细地图215来检测自动驾驶车辆周围的基础设施信息。具体地,基础设施信息可以包括道路的形式(车道、中间带等)、周围结构、交通信号灯的开启状态、人行横道轮廓线、道路边界等。位置信息检测器223可以配置为基于地图215、gps接收器216以及车辆网络217来检测自动驾驶车辆的位置信息。此外,输入装置20可以包括第一数据提取器231、第二数据提取器232、第三数据提取器233、第四数据提取器234、第五数据提取器235、第六数据提取器236、第七数据提取器237、第八数据提取器238以及第九数据提取器239。
[0054]
在下文中,将参照图3至图10描述按多个数据组中的每个数据组细分关于自动驾驶车辆进行掉头时针对安全性要考虑的各种情况的信息的过程。
[0055]
如图3所示,第一数据提取器231可以配置为从对象信息和基础设施信息中提取用于防止在自动驾驶车辆进行掉头时与在自动驾驶车辆前方首先进行掉头的前车发生碰撞的第一组数据。具体地,第一组数据可以是与前车的行为相关的数据,并且可以包括交通信号灯的开启状态、横摆率或纵向加速度随时间的累积值。如图4a至图4c所示,第二数据提取器232可以配置为从对象信息和基础设施信息中提取用于防止在自动驾驶车辆进行掉头时与周围车辆发生碰撞的第二组数据。具体地,第二组数据可以包括周围车辆的位置、速度、加速度、横摆率、前进方向等。
[0056]
图4a示出了与进行右转的周围车辆的碰撞的发生。图4b示出了与进行左转的周围车辆的碰撞的发生。图4c示出了与沿着自动驾驶车辆所在的方向直线行驶的周围车辆的碰撞的发生。
[0057]
如图5a至图5c所示,第三数据提取器233可以配置为从对象信息和基础设施信息中提取用于防止在自动驾驶车辆进行掉头时与行人发生碰撞的第三组数据。具体地,第三组数据可以包括行人的位置、速度或前进方向、行人周围的详细地图等。图5a示出了行人在人行横道上行走的示例。图5b示出了行人穿过马路的示例。图5c示出了行人在道路边界周围静止的示例。
[0058]
如图6所示,第四数据提取器234可以配置为基于基础设施信息和位置信息来提取在自动驾驶车辆进行掉头时位于自动驾驶车辆前方的各种类型的掉头标志作为第四组数据。具体地,掉头标志可以分为有条件的掉头标志和无条件的掉头标志。条件多种多样,例如“步行信号时”、“停止信号时”、“掉头信号时”和“左转时”。
[0059]
如图7所示,第五数据提取器235可以配置为基于基础设施信息和位置信息来检测位于自动驾驶车辆周围的各个交通信号灯的开启状态,并且在所获得的各个交通信号灯的开启状态之中提取与自动驾驶车辆的掉头相关的交通信号灯的开启状态作为第五组数据。具体地,交通信号灯可以包括与自动驾驶车辆的掉头相关的车辆交通信号灯、行人交通信号灯等。
[0060]
如图8a和图8b所示,第六数据提取器236可以配置为基于对象信息来提取基于静态对象的分布的可行驶区域、基于道路施工的路段的可行驶区域以及基于事故路段的可行驶区域作为第六组数据。在本文中,可行驶区域可以指与自动驾驶车辆正在行驶的车道相反的车道上的区域。例如,当自动驾驶车辆正在从一个方向到另一方向的车道上行驶时,相反的车道可以指从另一方向到该方向的车道。换句话说,自动驾驶车辆可以从第一车道行驶到第二车道,而相反的车道可以指车辆从第二车道行驶到第一车道。
[0061]
如图9a和图9b所示,第七数据提取器237可以配置为基于基础设施信息来提取基于道路结构的可行驶区域作为第七组数据。具体地,第七数据提取器237可以配置为从由摄像机212捕获的图像来提取可行驶区域,并且基于详细地图215上的自动驾驶车辆的位置来提取可行驶区域。可行驶区域可以指与自动驾驶车辆正在行驶的车道相反的车道上的区域。
[0062]
如图10所示,第八数据提取器238可以配置为提取由第六数据提取器236提取的可行驶区域和由第七数据提取器237提取的可行驶区域重叠的区域(最终可行驶区域)作为第八组数据。
[0063]
第九数据提取器239可以配置为通过位置信息并通过车辆网络217来提取作为自动驾驶车辆的行为数据的速度、加速度、前进方向、方向盘角度、横摆率、故障代码等作为第九组数据。学习装置30可以配置为基于深度学习,利用由第一数据提取器231提取的数据、由第二数据提取器232提取的数据、由第三数据提取器233提取的数据、由第四数据提取器234提取的数据、由第五数据提取器235提取的数据、由第八数据提取器238提取的数据以及由第九数据提取器239提取的数据来学习自动驾驶车辆能够进行掉头的情况。
[0064]
由学习装置30学习到的结果可以用于掉头确定装置41,以确定自动驾驶车辆是否能够进行或执行掉头。学习装置30可以利用卷积神经网络(convolutional neural network,cnn)、循环神经网络(recurrent neural network,rnn)、受限玻尔兹曼机器(restricted boltzmann machine,rbm)、深度信念网络(deep belief network,dbn)、深度q网络、生成对抗网络(generative adversarial network,gan)或softmax的至少一者作为人工神经网络。具体地,可以利用人工神经网络的至少10个或更多个隐藏层,并且在隐藏层中可以存在大约500个或更多个隐藏节点。然而,示例性实施方案不限于此。
[0065]
控制器40可以包括掉头确定装置41和条件确定装置42作为其功能组件。掉头确定装置41可以配置为将由第一数据提取器231提取的数据、由第二数据提取器232提取的数据、由第三数据提取器233提取的数据、由第四数据提取器234提取的数据、由第五数据提取器235提取的数据、由第八数据提取器238提取的数据以及由第九数据提取器239提取的数据应用到由学习装置30学习到的结果,以确定自动驾驶车辆是否能够进行掉头。
[0066]
掉头确定装置41还可以考虑由条件确定装置42确定的结果,以确定自动驾驶车辆是否能够进行掉头。换句话说,尽管初步确定出自动驾驶车辆能够进行掉头,但是当由条件确定装置42确定的结果指示违反交通法规时,掉头确定装置41可以配置为最终确定出自动驾驶车辆不能够进行掉头。
[0067]
此外,条件确定装置42可以配置为基于由第一数据提取器231提取的数据、由第二数据提取器232提取的数据、由第三数据提取器233提取的数据、由第四数据提取器234提取的数据、由第五数据提取器235提取的数据、由第八数据提取器238提取的数据以及由第九数据提取器239提取的数据来确定在自动驾驶车辆进行掉头时自动驾驶车辆是否违反交通法规。例如,如图11a所示,当写有短语“掉头信号时”的掉头标志位于自动驾驶车辆的前方时,条件确定装置42可以配置为基于掉头交通信号灯是否开启来确定自动驾驶车辆是否违反交通法规。掉头标志可以指示何时允许掉头(例如,在红灯时掉头等)。
[0068]
再例如,如图11b所示,尽管掉头标志位于自动驾驶车辆的前方,但是条件确定装置42可以配置为基于自动驾驶车辆的位置来确定自动驾驶车辆是否违反交通法规。具体
地,当自动驾驶车辆所在的掉头车道上的左侧道路线是间断的分隔线时,条件确定装置42可以配置为确定自动驾驶车辆所在的区域为允许掉头区域。在左侧道路线是连续的分隔线时,条件确定装置42可以配置为确定自动驾驶车辆所在的区域为禁止掉头区域。
[0069]
图12是示出根据本发明的示例性实施方案的用于自动驾驶车辆的掉头控制方法的流程图。首先,在步骤1201,图1的学习装置30可以配置为按每个组细分关于自动驾驶车辆进行掉头时要考虑的情况的信息,并且可以配置为执行深度学习。在步骤1202,图1的控制器40可以配置为基于由学习装置30学习到的结果来操作自动驾驶车辆的掉头。
[0070]
图13是示出根据本发明的示例性实施方案的用于执行用于自动驾驶车辆的掉头控制方法的计算系统的框图。参照图13,根据本发明的示例性实施方案的用于自动驾驶车辆的掉头控制方法可以由计算系统来实现。计算系统1000可以包括经由总线1200彼此连接的至少一个处理器1100、存储器1300、用户接口输入装置1400、用户接口输出装置1500、存储装置1600以及网络接口1700。
[0071]
处理器1100可以是处理存储在存储器1300和/或存储装置1600中的指令的中央处理单元(cpu)或半导体装置。存储器1300和存储装置1600可以包括各种类型的易失性或非易失性存储介质。例如,存储器1300可以包括rom(只读存储器)和ram(随机存取存储器)。
[0072]
因此,结合本文公开的示例性实施方案描述的方法或算法的操作可以直接实施在硬件中或由处理器1100执行的软件模块中,或者两者的组合中。软件模块可以位于存储介质(例如,存储器1300和/或存储装置1600)上,例如ram、闪存、rom、eprom、eeprom、寄存器、硬盘、可移动磁盘,cd-rom。示例性存储介质可以联接到处理器1100,并且处理器1100可以从存储介质中读取信息并且可以将信息记录在存储介质中。或者,存储介质可以与处理器1100集成。处理器1100和存储介质可以位于专用集成电路(asic)中。asic可以位于用户终端内。在另一示例中,处理器1100和存储介质可以作为单独的组件位于用户终端中。
[0073]
用于自动驾驶车辆的掉头控制系统和方法可以细分关于自动驾驶车辆进行掉头时针对安全性要考虑的各种情况的信息以执行深度学习,并且可以基于学习到的结果来确定自动驾驶车辆是否能够进行掉头,从而大大地减少在自动驾驶车辆进行掉头过程中可能发生的事故。
[0074]
在上文中,尽管已参照示例性实施方案和所附附图描述了本发明,但本发明并不限于此,而是可以由本发明所属领域的技术人员在不脱离本发明权利要求书保护的精神和范围的情况下做出各种修改和变化。
[0075]
因此,提供本发明的示例性实施方案来解释本发明的精神和范围而不是限制它们,因此本发明的精神和范围不受实施方案的限制。本发明的范围应当基于所附权利要求进行解释,在等同于权利要求的范围内的所有技术构思应当包含在本发明的范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19008205409】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips