 商标分类
商标分类  商标转让
商标转让 
一种智轨电车的虚拟轨道自适应照明装置及方法与流程
 2021-02-03 12:02:29|
2021-02-03 12:02:29| 299|
299| 起点商标网
起点商标网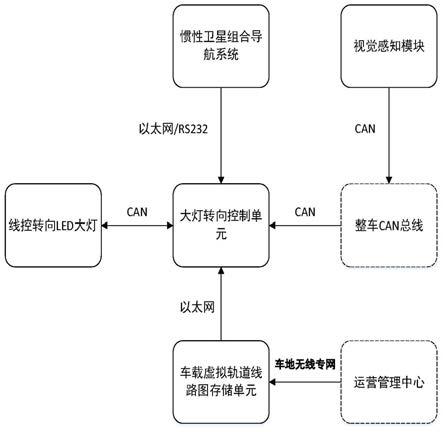
[0001]
本发明涉及照明系统领域,尤其涉及交通工具的前照灯自适应照明系统。
背景技术:
[0002]
智轨电车是一种新型城市公共客运列车,其特点表现为胶轮无轨、与传统汽车共享路权、不再沿固定轨道行驶。它既拥有公交车行驶灵活、建设和维护成本低的优点,又具备运输力大的优势,并且克服了地铁、轻轨、有轨电车等基础设施建设和车辆购置成本高,需要专门的电力系统和轨道配合设计的缺点。
[0003]
智轨电车取消了钢轨,取而代之的是通过胶轮承载、方向盘转向的方式跟随地面虚拟轨道行驶,地面虚拟轨道布置灵活,使车辆无需再沿着固定轨道行驶,且大大降低了基建成本,与有轨电车相比有较大的运营优势。同时,其“共享路权,混行交通”的运行特点,使得其交通系统在线路布设方面拥有组织灵活的优势。目前,智轨电车上已经实现了基于视觉的自动寻迹,进一步提升了智轨电车的智能化水平。
[0004]
然而,在实际运营过程中可能还存在一些不安全因素。夜间行车时,如果采用传统的固定车头大灯,只能照射到列车正前方的路面,在碰到弯道时,灯光无法变向,弯道路段会形成部分盲区。一方面驾驶员无法看到弯道路面上的行人、车辆,另一方面智轨电车也无法识别弯道上的虚拟轨道,影响跟随精度,导致车辆行驶存在安全隐患。
技术实现要素:
[0005]
本发明所要解决的技术问题是,针对现有技术的不足,提供了种智轨电车的虚拟轨道自适应照明装置,能够实时调整车头大灯转角,消除盲区点,提高车辆行驶安全性和保护行人。
[0006]
为了解决以上问题,根据本发明的第一个方面,提供了一种智轨电车的虚拟轨道自适应照明装置,所述智轨电车沿虚拟轨道行驶,包括:
[0007]
线控转向大灯,该大灯可以为led大灯;
[0008]
视觉感知模块,用于识别所述虚拟轨道;
[0009]
惯性卫星组合导航系统,用于接收卫星定位数据、车辆姿态和速度数据;
[0010]
大灯转向控制单元,与所述线控转向大灯、所述视觉感知模块和所述惯性卫星组合导航系统连接,能够与所述视觉感知模块、所述惯性卫星组合导航系统和所述线控转向大灯进行数据交互;
[0011]
所述虚拟轨道自适应照明装置还具有与所述大灯转向控制单元相连接的车载虚拟轨道线路图存储单元,所述车载虚拟轨道线路图存储单元通过车地无线专网与外部运营管理中心连接,能够接收并存储所述运营管理中心发送的实时虚拟轨道线路数据供所述大灯转向控制单元读取和搜索;
[0012]
所述大灯转向控制单元根据所述视觉感知模块、所述惯性卫星组合导航系统和所述车载虚拟轨道线路图存储单元的数据对所述线控转向大灯输出转向指令。
[0013]
优选的,所述大灯转向控制单元通过can总线与所述线控转向大灯、所述视觉感知模块连接。
[0014]
优选的,所述视觉感知模块通过整车can总线与所述大灯转向控制单元连接。
[0015]
优选的,所述大灯转向控制单元通过以太网或rs232与所述惯性卫星组合导航系统、所述车载虚拟轨道线路图存储单元连接。
[0016]
优选的,所述车载虚拟轨道线路图存储单元能够接收并存储所述运营管理中心发送的包含设定行驶轨迹、航向角、道路坡度、道路曲率信息在内的数据。
[0017]
优选的,所述大灯转向控制单元能够接收所述惯性卫星组合导航系统的包含实时定位、姿态、速度信息在内的数据。
[0018]
优选的,所述运营管理中心能够对车载虚拟轨道线路图存储单元发送所述虚拟轨道的初始设定和即时干预数据。
[0019]
优选的,所述视觉感知模块能够采集所述智轨电车的前方图像数据,通过特征提取识别所述虚拟轨道。
[0020]
优选的,所述虚拟轨道自适应照明装置在进行自适应照明时执行如下步骤:
[0021]
步骤1:所述视觉感知模块向所述大灯转向控制单元发送识别到的前方虚拟轨道信息;
[0022]
步骤2:所述惯性卫星组合导航系统向所述大灯转向控制单元发送实时的卫星定位、车辆姿态和车辆速度数据;
[0023]
步骤3:所述大灯转向控制单元采集实时车速,计算得到车辆预瞄点p的位置;
[0024]
步骤4:所述大灯转向控制单元读取所述车载虚拟轨道线路图存储单元中的数据,搜索所述预瞄点p的gps轨迹数据;
[0025]
步骤5:所述大灯转向控制单元读取所述视觉感知模块识别到的预瞄点p的虚拟轨道数据;
[0026]
步骤6:所述大灯转向控制单元提取所述预瞄点p的航向角θ
p
,计算实时车辆航向角θ0,得到航向角差值δθ;
[0027]
步骤7:所述大灯转向控制单元计算得到期望大灯转角
[0028]
步骤8:所述大灯转向控制单元将所述期望大灯转角发送至所述线控转向大灯,控制大灯转向。
[0029]
优选的,所述步骤3中,所述预瞄点p的位置根据公式l=v
×
t计算得到,其中,v为实时车速,l为前视距离,t为固定系数。
[0030]
优选的,所述步骤7中,所述期望大灯转角根据公式计算得到,其中,k
θ
为补偿系数。
[0031]
根据本发明的第二个方面,提供了一种智轨电车的虚拟轨道自适应照明方法,所述智轨电车包括大灯转向控制单元、线控转向大灯、视觉感知模块、惯性卫星组合导航系统和车载虚拟轨道线路图存储单元,其中所述大灯转向控制单元与所述线控转向大灯、所述视觉感知模块、所述惯性卫星组合导航系统和所述车载虚拟轨道线路图存储连接以进行数据交互,
[0032]
所述虚拟轨道自适应照明方法包括如下步骤:
[0033]
步骤1:所述视觉感知模块向所述大灯转向控制单元发送识别到的前方虚拟轨道信息;
[0034]
步骤2:所述惯性卫星组合导航系统向所述大灯转向控制单元发送实时的卫星定位、车辆姿态和车辆速度数据;
[0035]
步骤3:所述大灯转向控制单元采集实时车速,计算得到车辆预瞄点p的位置;
[0036]
步骤4:所述大灯转向控制单元读取所述车载虚拟轨道线路图存储单元中的数据,搜索所述预瞄点p的gps轨迹数据;
[0037]
步骤5:所述大灯转向控制单元读取所述视觉感知模块识别到的预瞄点p的虚拟轨道数据;
[0038]
步骤6:所述大灯转向控制单元提取所述预瞄点p的航向角θ
p
,计算实时车辆航向角θ0,得到航向角差值δθ;
[0039]
步骤7:所述大灯转向控制单元计算得到期望大灯转角
[0040]
步骤8:所述大灯转向控制单元将所述期望大灯转角发送至所述线控转向大灯,控制大灯转向。
[0041]
优选的,所述步骤1中,所述视觉感知模块能够采集所述智轨电车的前方图像数据,通过特征提取识别所述虚拟轨道。
[0042]
优选的,所述步骤3中,所述预瞄点p的位置根据公式l=v
×
t计算得到,其中,v为实时车速,l为前视距离,t为固定系数。
[0043]
优选的,所述步骤7中,所述期望大灯转角根据公式计算得到,其中,k
θ
为补偿系数。
[0044]
优选的,所述大灯转向控制单元通过can总线与所述线控转向led大灯、所述视觉感知模块进行数据交互。
[0045]
优选的,所述大灯转向控制单元通过整车can总线与所述视觉感知模块进行数据交互。
[0046]
优选的,所述大灯转向控制单元通过以太网或rs232与所述惯性卫星组合导航系统、所述车载虚拟轨道线路图存储单元进行数据交互。
[0047]
优选的,所述车载虚拟轨道线路图存储单元能够通过车地无线专网与运营管理中心交互包括设定行驶轨迹、航向角、道路坡度和道路曲率信息在内的数据。
[0048]
优选的,所述运营管理中心能够对车载虚拟轨道线路图存储单元发送所述虚拟轨道的初始设定和即时干预数据。
[0049]
优选的,所述大灯转向控制单元能够与所述惯性卫星组合导航系统交互包含实时定位、姿态、速度信息在内的数据。
[0050]
与现有技术相比,本发明能够驱动智轨电车车头led大灯主动跟随前方虚拟轨道进行照明,保证驾驶员在夜间也可以清晰观察到前方弯道路段虚拟轨道上的实际情况,消除了夜间智轨电车驾驶员的视野盲区以及虚拟轨道识别盲区,并提高车辆行驶安全性,同时支持智轨电车在夜间也能准确识别出前方弯道路段的虚拟轨道,还能够固定虚拟轨道线路数据更新频率,提高了数据准确性,减少了投入资源,实现了全天智能驾驶和全天候运营需求。
附图说明
[0051]
本发明的以上发明内容以及下面的具体实施方式在结合附图阅读时会得到更好的理解。需要说明的是,附图仅作为所请求保护的发明的示例。在附图中,相同的附图标记代表相同或类似的元素。
[0052]
图1是根据本发明一实施例的一种智轨电车的虚拟轨道自适应照明装置示意图;
[0053]
图2是根据本发明一实施例的一种智轨电车的虚拟轨道自适应照明方法示意图;以及
[0054]
图3是根据本发明一实施例的预瞄点位置示意图。
具体实施方式
[0055]
以下在具体实施方式中详细叙述本发明的详细特征以及优点,其内容足以使任何本领域技术人员了解本发明的技术内容并据以实施,且根据本说明书所揭露的说明书、权利要求及附图,本领域技术人员可轻易地理解本发明相关的目的及优点。
[0056]
参见图1,作为本发明的第一个方面,提供了一种智轨电车的虚拟轨道自适应照明装置,所述智轨电车沿虚拟轨道行驶,包括:
[0057]
线控转向大灯;
[0058]
视觉感知模块,用于识别所述虚拟轨道;
[0059]
惯性卫星组合导航系统,用于接收卫星定位数据、车辆姿态和速度数据;
[0060]
大灯转向控制单元,与所述线控转向大灯、所述视觉感知模块和所述惯性卫星组合导航系统连接,能够与所述视觉感知模块、所述惯性卫星组合导航系统和所述线控转向大灯进行数据交互;
[0061]
所述虚拟轨道自适应照明装置还具有与所述大灯转向控制单元相连接的车载虚拟轨道线路图存储单元,所述车载虚拟轨道线路图存储单元通过车地无线专网与外部运营管理中心连接,能够接收并存储运营管理中心发送的实时虚拟轨道线路数据供大灯转向控制单元读取和搜索;
[0062]
大灯转向控制单元根据视觉感知模块、惯性卫星组合导航系统和车载虚拟轨道线路图存储单元的数据对线控转向大灯输出转向指令。
[0063]
本发明具备实时定位、虚拟轨道线路数据接收、虚拟轨道线路信息查询、决策驱动车头大灯转向等功能。
[0064]
进一步的,大灯转向控制单元通过can总线(或其它合适方式)与线控转向led大灯、视觉感知模块连接。
[0065]
进一步的,视觉感知模块通过整车can总线与大灯转向控制单元连接。
[0066]
进一步的,大灯转向控制单元通过以太网或rs232(或其它合适方式)与惯性卫星组合导航系统、车载虚拟轨道线路图存储单元连接。
[0067]
进一步的,车载虚拟轨道线路图存储单元能够接收并存储运营管理中心发送的包含设定行驶轨迹、航向角、道路坡度、道路曲率信息在内的数据。
[0068]
进一步的,大灯转向控制单元能够接收惯性卫星组合导航系统的包含实时定位、姿态、速度信息在内的数据。
[0069]
进一步的,运营管理中心能够对车载虚拟轨道线路图存储单元发送虚拟轨道的初
始设定和即时干预数据,这主要是通过把初始或目标运行线路的gps轨迹数据发送给车载虚拟轨道线路图存储单元来实现的。
[0070]
进一步的,视觉感知模块能够采集智轨电车的前方图像数据,通过特征提取识别虚拟轨道。
[0071]
本发明在第二方面,提供了一种智轨电车的虚拟轨道自适应照明方法,智轨电车包括大灯转向控制单元、线控转向大灯、视觉感知模块、惯性卫星组合导航系统和车载虚拟轨道线路图存储单元,大灯转向控制单元和线控转向led大灯、视觉感知模块通过can总线(或其它合适方式)连接,大灯转向控制单元和惯性卫星组合导航系统通过以太网或rs232(或其它合适方式)连接,使得大灯转向控制单元与线控转向大灯、视觉感知模块、惯性卫星组合导航系统和车载虚拟轨道线路图存储能够进行数据交互,
[0072]
参见图2,虚拟轨道自适应照明方法包括如下步骤:
[0073]
步骤1:视觉感知模块向大灯转向控制单元发送识别到的前方虚拟轨道信息;
[0074]
步骤2:惯性卫星组合导航系统向大灯转向控制单元发送实时的卫星定位、车辆姿态和车辆速度数据;
[0075]
步骤3:大灯转向控制单元采集实时车速,计算得到车辆预瞄点p的位置;
[0076]
步骤4:大灯转向控制单元读取车载虚拟轨道线路图存储单元中的数据,搜索预瞄点p的gps轨迹数据;
[0077]
步骤5:大灯转向控制单元读取视觉感知模块识别到的预瞄点p的虚拟轨道数据;
[0078]
步骤6:大灯转向控制单元提取预瞄点p的航向角θ
p
,计算实时车辆航向角θ0,得到航向角差值δθ;
[0079]
步骤7:大灯转向控制单元计算得到期望大灯转角
[0080]
步骤8:大灯转向控制单元将期望大灯转角发送至线控转向大灯,控制大灯转向。
[0081]
进一步的,步骤1中,视觉感知模块能够采集智轨电车的前方图像数据,通过特征提取识别虚拟轨道。
[0082]
进一步的,参见图3,步骤3中,预瞄点p的位置根据公式l=v
×
t计算得到,其中,v为实时车速,l为前视距离,t为固定系数,即根据实时车速预测车辆未来位置的比例数值。
[0083]
进一步的,步骤7中,期望大灯转角根据公式算得到,其中,k
θ
为补偿系数,即考虑了线控转向大灯的执行延时后,对期望大灯转角做的比例补偿。
[0084]
由于执行时间受车速影响,故此补偿系数应根据车速相应地进行调整。补偿系数k
θ
与车速v的对应关系如下表所示:
[0085]
车速v(km/h)k
θ
v≤10k110<v≤25k225<v≤40k340<v≤55k455<v≤70k5[0086]
这里采用的术语和表述方式只是用于描述,本发明并不应局限于这些术语和表
述。使用这些术语和表述并不意味着排除任何示意和描述(或其中部分)的等效特征,应认识到可能存在的各种修改也应包含在权利要求范围内。其他修改、变化和替换,例如不同规格的元器件的替换,也可能存在。相应的,权利要求应视为覆盖所有这些等效物。
[0087]
同样,需要指出的是,虽然本发明已参照当前的具体实施例来描述,但是本技术领域中的普通技术人员应当认识到,以上的实施例仅是用来说明本发明,在没有脱离本发明精神的情况下还可做出各种等效的变化或替换,因此,只要在本发明的实质精神范围内对上述实施例的变化、变型都将落在本申请的权利要求书的范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips